Introduction
BALUA was present in MakerFaire Lisbon which occurred between 19 and 21 of September. In there we had stand to showcase and share our work with the public, and we also seized the opportunity and made an actual launch while there.
The launch was made in the rooftop of Pavilhão do Conhecimento at about 12.00am. Launch coordinates were: 38.762297, -9.095591. We broadcasted APRS (144.800MHz) with the callsign CS5CEP (thanks to AMRAD) which could be followed here. And the SPOT tracker link was this.
___________________________
Objectives
- Make a second and more complete test with our All-in-One Tracker.
- Test our new GPS Receiver PCB connected to the Kenwood D710 in order to have real time tracking of the heading and distance of the tracking van to the balloon.
- Take some awesome pictures from Lisbon and Tagus River
- Showcase and explain to the general audience the procedures and the equipment required for making a HAB launch.
___________________________
Specifications
Mass
- Payload = 443g
- Parachute = 70g
- Total = 513g
Communication
- SPOT Tracking System
- Radiometrix HX1 – VHF transmitter hard-tuned to 144.8 MHz
- UHF beacon hard tuned to 434.480MHz
Sensors
- Ublox Max 7 GPS
- 1 pressure sensor
Power
- 2x AA Lithium Energizer batteries.
___________________________
How it works
Hardware
The main flight computer was a custom PCB with an ATmega328 running the arduino bootloader. Also on-board is a 5V step up voltage regulators that powers a Radiometrix HX1 (VHF transmitter, hard-tuned to 144.8 MHz which outputs 300mW (draining 120mA at full RF). There is also a and 3.3V step up voltage regulators that powers everything else. The flight computer receives data from the uBlox GPS and the pressure sensor. The temperature sensor and rfm22b were not used in this flight. All data can be stored on an on-board microSD card but that was not implemented in this launch since what we really wanted to test were communications. All systems are powered by just 2x AA Lithium Energizer batteries. Lastly, a chemical heater was embedded within the payload casing.
As a backup system we have a SPOT satellite GPS Messenger. This equipment is placed in a special casing that allows it to rotate and always face north.
We also have a beacon that gives a beep in UHF every second (a type of beacon used often in animal tracking). This beacon is used by us in conjugation with a yagi antenna to track the balloon when we are close by (it was important in Barcelos).
Software
The ATmega328 running the arduino bootloader is programmed in C language and the main software loop runs on the following instructions:
- Reads gps data and parses it,
- Reads sensors and converts data,
- Sends data through the HX1
___________________________
Estimated Flight Plan
For this flight, we had the location defined and played with the balloon helium filling in order to make it land close to Lisbon (for easy recovery of the payload). The following images are the predicted flight path.



___________________________
Flight Report
Before the Launch
Prior to the launch, actually the day before, we took all the equipment to pavilhão do conhecimento and return to IST to prepare the rest of the equipment for the launch and for the stand. Mostly cutting a new box for the payload, preparing the camera and the tracking vehicle, etc..

The Launch
We left IST early and went straight to the MakerFaire to set up the stand and prepare the launch which was set to 12am.
Once on the rooftop o pavilhão atlântico we started laying everything down, filling the balloon, all the standard procedures that we already know like the back of our hands. Down there were a lot of people watching us preparing the launch and soon enough the balloon was airborne, everything congratulated us and we started preparing the chase.

We went straight to Santarém and in there we waited for it to come. Meanwhile we were able to continuously receive APRS packages, SPOT, and even the VHF beacon correctly. Everything was working as it was supposed to, even the GPS receiver for the Kenwood D710 was giving us continuous and accurate projections of the balloon location.
Having all the systems working we corrected our location based on the actual flight path of the balloon instead of the predicted and at about 2pm the balloon landed in a field close to a road. Everything was retrieved successfully and our new tracker behaved like a champion again.
Conclusions
1º – Our new tracker worked flawlessly during the flight.
2º – The GPS receiver for the Kenwood D710 worked like charm giving us continuous directions of the heading and distance of the chasing van to the balloon.
3º – Balua’s payload landed in Santarém. The recovery was nice and easy.
4º – The images and video obtained were amazing!!! Lisbon from above is beautiful!
5º – Last but not least, the experience of launching this balloon with an audience of makers and interested people was amazing!


___________________________
Pictures and Video
Pictures and/or movies can be found in the gallery section here.
___________________________
Real Flight
The following images are the real flight path received through APRS. The bottom line is our return path to pavilhão do conhecimento:


SPOT track:

___________________________
Results/Data
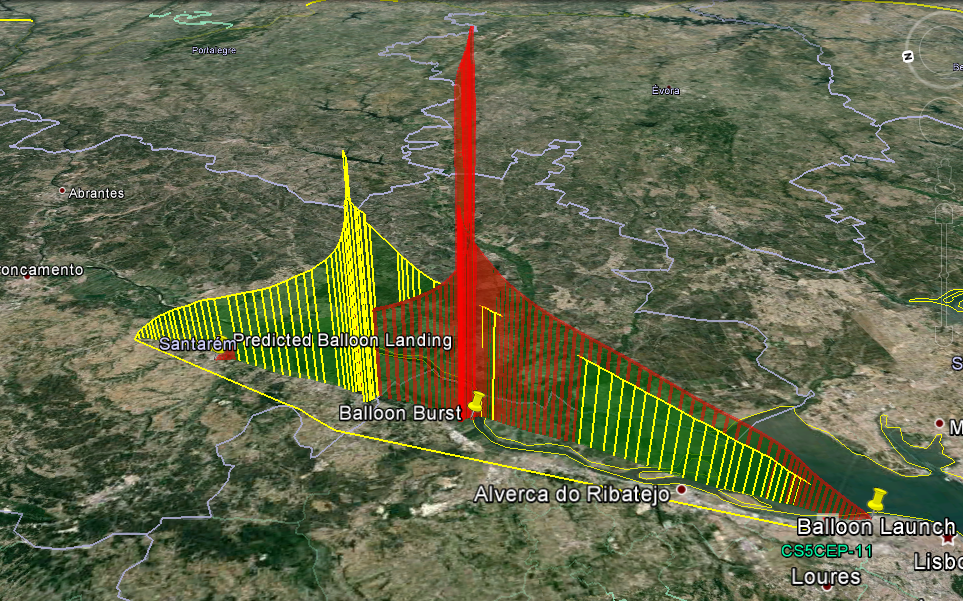
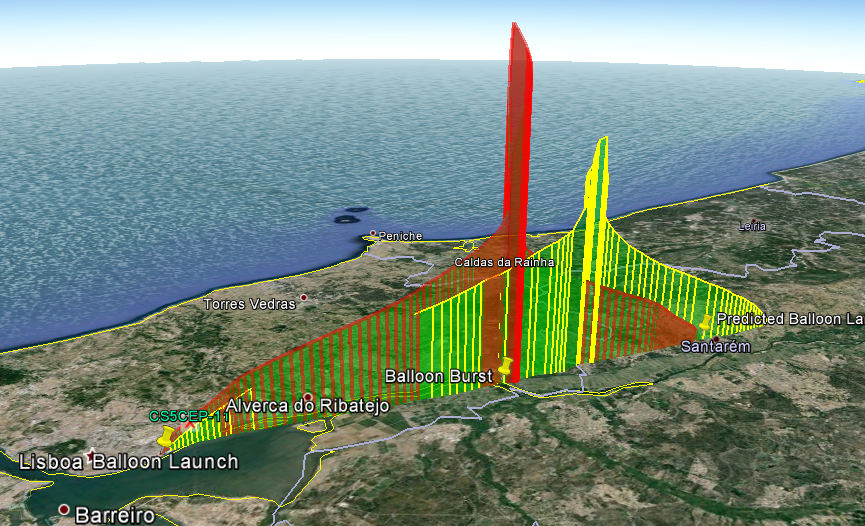
Flight Comparison
As we can see in the images below, the tool was not as accurate as it was normally. We believe that the balloon ruptured before what was expected and because of that the path diverged a lot. However it still landed a few Km from what was expected. In red is the predicted and in yellow the real flight path.